Sửa chữa bảo dưỡng động cơ điện các loại
Cơ điện HUẾ HƯƠNG chuyên: - Quấn mới, sửa chữa động cơ điện, mô tơ điện các loại.... - Máy phát điện. - Nồi cơm điện, quạt điện.... - Nhận làm kích điện

Nhận làm mạch invert 12 ra 220V, mạch kích cá công suất theo yêu cầu
Công suất 1000W: Đánh bắt cá trên thuyền (sông, ao, hồ...).

Nhận lắp đặt tủ điện bảng điện
Sửa chữa thay thế lắp mới bảng điện tủ điện điều khiển động cơ

Bán Ronha kiểm tra roto
Ronha thiết bị không thể thiếu thợ điện cơ. Bán phân phối toàn quốc

Bán sách, sơ đồ quấn các loại động cơ, tài liệu
Sách kinh nghiệm ghi chép tất cả các sơ đồ động cơ, máy phát điện từ đơn giản đến phức tạp, sách được ghi từ số liệu thực tế, dữ liệu được scan lại
Thứ Bảy, 29 tháng 5, 2021
Thứ Năm, 27 tháng 5, 2021
DOWNLOAD DRIVER USB-SC09 PLC MITSUBISHI
Download Driver USB-SC09 PLC Mitsubishi
Cáp lập trình USB-SC09 được sử dụng để Download hoặc Upload chương trình PLC Mitsubishi họ FX Series như FX0, FX1N, FX1S, FX2N, FX2NC, FX3U, FX3G…

Download Driver USB-SC09 PLC Mitsubishi tại đây:


Thứ Tư, 26 tháng 5, 2021
So sánh: Điều khiển PLC hay Relay??
So sánh: Điều khiển PLC hay Relay??
Khi xây dựng 1 tủ điện điều khiển chúng ta thường nghĩ tới ngay giải pháp dùng Relay hay là PLC.
Khi yêu cầu ở mức đơn giản, không yêu cầu cao về quá trình chạy tự động thì mạch Relay cũng là một phương án tốt.
Song để chuyên nghiệp hoá và đạt được độ tin cậy cao trong điều khiển, xử lý được các bài toán phức tạp thì PLC là một giải pháp hoàn hảo.

Hãy uống nước từ dòng suối nơi ngựa uống
Hãy uống nước từ dòng suối nơi ngựa uống
Con ngựa chẳng bao giờ uống nước xấu đâu
Hãy đặt giường nơi chú mèo nằm ngủ
Ăn trái cây có dấu vết của chú sâu
Hãy chọn nấm có côn trùng đậu lại
Hãy trồng cây nơi chuột chũi dũi đất lên
Xây nhà bạn nơi rắn nằm sưởi ấm
Đào giếng nơi loài chim tránh nắng rền
Đi ngủ và thức giấc cùng lũ chim - bạn gặt hái những ngày vàng thóc lúa
Ăn nhiều màu xanh - bạn có đôi chân và trái tim khỏe như những sinh vật rừng sâu
Bơi thường xuyên, bạn sẽ thấy mình sống trên trái đất như cá trong làn nước,
Ngắm bầu trời luôn khi có thể, suy nghĩ bạn sẽ nhẹ bẫng và trong suốt
Hãy im lặng nhiều, nói thật ít - sự tĩnh lặng sẽ đến trong tim, tâm hồn bạn an tĩnh và tràn đầy bình yên.
-----------






Thứ Ba, 25 tháng 5, 2021
22 câu nói đi vào lòng người của Tiến sĩ Lê Thẩm Dương
22 câu nói đi vào lòng người của Tiến sĩ Lê Thẩm Dương
Khi nhắc tới Tiến Sĩ Lê Thẩm Dương, là nhắc đến khả năng truyền cảm hứng thông qua những câu nói hay đây vui nhộn, hóm hỉnh. Nếu bạn chưa từng biết tới những câu nói nổi tiếng của Tiến sĩ Lê Thẩm Dương thì hãy tìm hiểu trong bài viết dưới đây nhé.
1. Khác biệt đừng để dị biệt.
2. Khó mới cần học, dễ thì cần gì hỏi.
3. Cuộc sống khó hơn bạn nghĩ nhưng nó không khó nếu như bạn tư duy.
4. Cái gì cũng phải học.
5. Lúc nào cũng phải nghĩ.
6. Miếng phô mai có sẵn chỉ có ở trên cái bẫy chuột.
7. Cái gì cũng phải học… học quyết liệt đi.
8. Cảm xúc là kẻ thù số một của thành công.
9. Một ngày không học được cái gì thì đừng đi ngủ.
10. Nhàm chán + so sánh sẽ giết chết bạn.
11. Túi tiền gần con tim, xa bộ não. Lấy được tim là móc được túi.
12. Bạn không cần giàu ở điểm xuất phát nhưng phải có tầm nhìn.
13. Thấy người ta giỏi hơn mình, cúi xuống thừa nhận, và cố gắng được như vậy.
14. Phải tập phản xạ nhanh, cái gì cũng liên tưởng được thì mới làm kinh tế được.
15. Muốn nhanh thì phải từ từ.
16. Kẻ trưởng thành là kẻ biết dùng mình chứ không phải kẻ trên 18 tuổi.
17. Nhiều cộng vân vân là biểu hiện của bí.
18. Cái đích của cuộc đời 1 là sức khỏe 2 là gia đình, 3 là sự nghiệp, và 4 là bạn bè, kẻ thành công là kẻ làm được hàm fx này.
19. Ai cũng có chỗ để khen.
20. Khôn đi với ngoan. Đừng khôn mất dạy.
21. Thông minh mới giả ngu. Còn ngu sẵn rồi thì không cần nữa.
22. Kiềm chế là sức mạnh – Sức mạnh là kiềm chế.
!
Tại sao dùng tín hiệu 4-20mA mà không phải tín hiệu 0-20mA?
💥💥💥 [𝗚𝗢́𝗖 𝗖𝗛𝗜𝗔 𝗦𝗘̉]
Tại sao dùng tín hiệu 4-20mA mà không phải tín hiệu 0-20mA?
Nhìn vào các sơ đồ tín hiệu dòng 4-20mA chúng ta thấy giá trị Min bắt đầu của tín hiệu là 4mA và giá trị kết thúc của tín hiệu là 20mA . Tín hiệu 4-20mA biểu thị cho một giá trị đo được nào đó của thiết bị đo lường hoặc thiết bị điều khiển .
Một cảm biến áp suất có dãy đo 0-100bar có tín hiệu về là 4-20mA hay một cảm biến nhiệt độ có dãy dãy đo 0-100°C hay cảm biến nhiệt độ có dãy đo 0-1000°C qua bộ chuyển đổi tín hiệu nhiệt độ cũng chỉ đưa tín hiệu về 4-20mA . Điều này cho chúng ta thấy gần như tất cả các tín hiệu đều đưa về tín hiệu chuẩn 4-20mA .
⁉️⁉️ Lý do người ta nghiên cứu dùng tín hiệu 4-20mA thay vì 0-20mA là vì:
👉 Phân biệt đâu là tín hiệu truyền về: Đâu là tín hiệu mất nguồn hay đứt cable hay bo mạch bị hư!
𝗩𝗶́ 𝗱𝘂̣: Giả sử cảm biến áp suất có dãy đo 0-100 bar tương ứng với tín hiệu 4-20mA thì giá trị 4mA tương ứng với áp suất bằng không ( 0 ), tại giá trị 100bar sẽ đưa về tín hiệu 20mA. Trong trường hợp cảm biến bị hư hỏng giá trị đưa về sẽ là 3.8mA (Theo mặc định một số cảm biến) hoặc khi áp suất vượt ngưỡng sẽ cho ra tín hiệu 23mA (Theo quy định của một số hãng lớn trên thế giới). Trường hợp bị mất nguồn tín hiệu đưa về 0 mA chúng ta xác định rõ đây là bị ngắn mạch (Đứt cable hoặc mất nguồn).
Trong trường hợp này nếu chúng ta dùng cảm biến áp suất có tín hiệu 0-20mA thì khi cảm biến bị hư hỏng hay bị ngắn mạch thì tín hiệu đưa về đều là 0 mA. Việc chẩn đoán bị ngắn mạch hay cảm biến bị hư hỏng là khó khăn và tốn thời gian hơn nhiều. Chúng ta rất dễ nhầm lẫn giữa cảm biến hư hỏng và cảm biến đang hoạt động như có giá trị là không (0). Điều này rất nguy hiểm trong điều khiển tự động hóa.
#hoplongtech
Tại sao dải Analog 4-20mA được ưu tiên hơn 0-10V?
💥💥💥 [𝗚𝗢́𝗖 𝗖𝗛𝗜𝗔 𝗦𝗘̉]
Tại sao dải Analog 4-20mA được ưu tiên hơn 0-10V?
Có rất nhiều bạn nói rằng khi đi học chỉ biết tín hiệu analog chỉ là tín hiệu 0-10V hoăc 0-5V nên hầu như không có/ có rất ít kiến thức gì về tín hiệu 4-20mA. Tuy nhiên, khi đi làm thực tế thì hầu như hơn 80% đều là dùng tín hiệu dòng 4-20mA. Vậy tại sao tín hiệu dòng 4-20mA lại phổ biến như vậy?
Có những lý do sau:
1️⃣ Tín hiệu áp 0-10V bị suy giảm tín hiệu và dể bị nhiễu
- Các tín hiệu analog từ các cảm biến đưa về có thể cách xa tủ điều khiển trung tâm từ 100m đến 1km là chuyện rất bình thường. Trước kia các cảm biến dùng tín hiệu analog 0-10V để truyền về PLC, với khoảng cách xa như vậy việc sụt áp tín hiệu là điều thường thấy trên các tín hiệu Analog dòng 0-10V hoặc 0-5V. Một điều ít ai biết nữa chính là tín hiệu dòng 0-10V rất dể bị nhiễu bởi các dây động lực hoặc sóng hài hoặc motor hay biến tần khi dây tín hiệu đi ngang qua các thiết bị này.
- Chính vì thế trong điều khiển sẽ phát sinh ra bộ cách ly tín hiệu hay bộ khuếch đại tín hiệu để chống nhiễu trên tín hiệu analog dòng 4-20mA hoặc analog áp 0-10V.
2️⃣ Tín hiệu dòng 4-20mA không bị suy giảm bởi khoảng cách?
- Câu hỏi đầu tiên mọi người khi đọc được thông tin “tín hiệu dòng 4-20mA không bọ suy giảm bởi khoảng cách” là “vậy nó truyền được bao xa” hoặc một số người không tin vào điều này.
- Nguồn dòng hay nguồn cấp dòng hoặc tiêu thụ dòng là nguồn có tổng trở rất lớn. Chính vì thế mà tín hiệu analog dòng 4-20mA ít bị ảnh hưởng bởi điện trở của dây ngoại trừ tổng trở của dây dẩn quá lớn vượt qua ngưỡng cho phép.
- Các tín hiệu làm nhiễu như biến tần, sóng hài, motor phát ra từ trường thường là xung điện áp. Chính vì thế với nguồn tín hiệu là nguồn dòng và tải tín hiệu lại có điện trở nhỏ, các xung nhiễu điện áp gần như ít bị ảnh hưởng. Tuy nhiên đó chỉ là các ảnh hưởng nhỏ của tác động ngoại vi bên ngoài có công suất nhỏ, trong trường hợp các Motor hay biến tần có công suất lớn thì việc chống nhiễu là một điều không dể dàng. Lúc đó chúng ta phải mất tiền để mua thêm bộ lọc nhiễu.
- Ngoài ra tín hiệu dòng 4-20mA có thể truyền trên 2 dây, tức là nguồn và tín hiệu chung giúp tiết kiệm dây dẩn so với tín hiệu dòng 4-20mA loại 3 dây. Chúng ta hay gọi đó là nguồn 4-20mA loop power
⁉ Tín hiệu 4-20mA 2 dây và tín hiệu 4-20mA 3 dây
- Tín hiệu 4-20mA có hai dạng là tín hiệu 4-20mA Passive (không nguồn – 2 dây) và tín hiệu 4-20mA Active (có nguồn – 3 dây). Rất nhiều người không phân biệt được giữa tín hiệu 4-20mA Active và tín hiệu 4-20mA Passive.
- Tín hiệu 4-20mA 2 dây hay còn gọi là tín hiệu 4-20mA passive tức là không cần nguồn cấp mà nguồn và tín hiệu chung. Chúng ta thường thấy các tín hiệu 4-20mA Passive trong các cảm biến áp suất hay bộ chuyển đổi tín hiệu nhiệt độ.
- Tín hiệu 4-20mA 3 dây hay còn gọi là tín hiệu 4-20mA Active tức là 2 dây cấp nguồn 24vdc và một dây signal 4-20mA đưa về. Tín hiệu 4-20mA Active được dùng trong các máy móc cũ để dể truyền tín hiệu 4-20mA về. Tuy nhiên việc truyền bằng tín hiệu 4-20mA Active dể bị nhiễu hơn tín hiệu 4-20mA Passive.
- Một điều chúng ta thường gặp nữa là phần lớn các bộ đọc tín hiệu analog hoặc PLC chỉ đọc được tín hiệu 4-20mA có nguồn dòng (Active) mà không đọc được tín hiệu 4-20mA Passive. Vậy làm sao để PLC đọc được tín hiệu 4-20mA 2 dây không nguồn (Passive). Việc này hết sức đơn giản với việc kết nối nối tiếp với nguồn 24Vdc bên ngoài.
Cách kết nối tín hiệu 4-20mA 2 dây (không nguồn) với PLC hoặc bộ đọc tín hiệu Active
- Việc kết nối tín hiệu 4-20mA 2 dây (không nguồn) với PLC được thực hiện đơn giản với việc cấp thêm một nguồn 24Vdc. Nguồn Dương 24Vdc (+) được kết nối với chân Dương (+) của cảm biến áp suất 2 dây hay bộ chuyển đổi tín hiệu 2 dây Passive, chân Âm (–) của cảm biến áp suất 2 dây nối với chân Dương (+) của PLC, còn chân Âm (–) của bộ nguồn 24Vdc nối với chân Âm (–) của PLC.
- Việc nối như thế tạo thành một vòng tròn kín giúp tín hiệu 4-20mA 2 dây của cảm biến áp suất có nguồn nuôi đưa tín hiệu về PLC để xử lý tín hiệu analog 4-20mA.
>>> Xem thêm: Tại sao dùng tín hiệu 4-20mA mà không phải tín hiệu 0-20mA? https://www.facebook.com/hoplongtech/posts/4144020995620400
--- ---- ---- ----
Ad thấy một bài viết khá hay nên chia sẻ lại, mọi người tham khảo nhé!
#hoplongtech
💥 BẢN CHẤT TÍN HIỆU ANALOG TRONG PLC
💥💥💥 BẢN CHẤT TÍN HIỆU ANALOG TRONG PLC
Khi làm việc với PLC, có 2 loại tín hiệu cần quan tâm: tín hiệu số (Digital) và tín hiệu tương tự (Analog).
- Tín hiệu số thì khá đơn giản, bản chất của tín hiệu số là chỉ có 2 trạng thái Logic 0 và 1 tương ứng với mức điện áp logic của PLC (ví dụ mức điện áp 0 V ứng với mức Logic 0, mức điện áp 24V ứng với mức Logic 1).
- Nhưng để xử lý tín hiệu tương tự thì không đơn giản như vậy. Tín hiệu tương tự có một dải giá trị chứ không phải chỉ có 2 giá trị như tín hiệu số. Tín hiệu tương tự sử dụng với PLC có 2 dạng: điện áp và dòng điện. Tín hiệu kiểu điện áp có thể là: 0 ~ 10V, -5V ~ 5V,… Tín hiệu dòng điện có thể là 0 ~ 20mA, 4 ~ 20mA,…
- PLC là một thiết bị điện tử, hoạt động trên nguyên lý nhị phân, chỉ xử lý được các tín hiệu ở dạng 0/1. Nhưng khi ghép nhiều bit vào với nhau, giá trị số lưu trữ được (dạng nhị phân) sẽ tăng lên. Do đó cần phải có những Module biến đổi tín hiệu tương tự thành những giá trị số chứa trong một chuỗi bit giúp cho PLC hiểu được.
- Để đọc, ghi được các tín hiệu tương tự này, PLC có các Module Analog đầu vào (Analog Input) và Analog đầu ra (Analog Output)
- Module Analog đầu vào bản chất là bộ biến đối Từ tương tự sang số (Analog Digital Converter-ADC) có chức năng biến đổi tín hiệu dạng tương tự đầu vào sang tín hiệu số ở đầu ra (ví dụ biến đổi dải dòng điện 4 ~ 20mA thành dải giá trị số 0 ~ 1000). Độ chính xác của phép biến đổi này phụ thuộc vào độ phân giải của Module (nghĩa là độ dài chuỗi bit chứa giá trị số)
- Module Analog đầu ra bản chất là bộ biến đối Từ số sang tương tự (Digital Analog Converter-DAC) có chức năng biến đổi tín hiệu dạng số ở đầu vào sang tín hiệu tương ở đầu ra (ví dụ biến đổi dải giá trị số 0 ~ 4000 thành dải dòng điện 4 ~ 20mA). Độ chính xác của phép biến đổi này phụ thuộc vào độ phân giải của Module (nghĩa là độ dài chuỗi bit chứa giá trị số)
👉 Quy trình để xử lý tín hiệu Analog đầu vào
Đo một đại lượng thực tế cần đo đếm (nhiệt độ, áp suất, mức,…) bằng thiết bị đo tương ứng, thiết bị đo này chuyển giá trị đại lượng đo thành tín hiệu đầu ra dạng tương tự. Tín hiệu tương tự này được đưa vào module Analog input của PLC để biến đổi thành giá trị số. Tuy nhiên người lập trình không thể sử dụng giá trị số này mà phải quy đổi tín hiệu số này về khung giá trị của đại lượng cần đo. Từ đó mang giá trị này đi xử lý trong logic điều khiển (so sánh, tính toán,…)
👉 Quy trình xử lý tín hiệu Analog đầu ra
Đại lượng cần điều khiển (tần số động cơ, độ mở van tuyến tính,…) được điều khiển bằng thiết bị điều khiển trực tiếp (biến tần, mạch điều khiển van). Thiết bị điều khiển này nhận tín hiệu tương tự xuất ra từ PLC (từ module Analog Output). Tuy nhiên module này chỉ hiểu được các giá trị số, không thể nhập trực tiếp giá trị 50 Hz hay 10V vào được. Người lập trình sẽ phải quy đổi giá trị đặt tương ứng thành giá trị số theo dải biến đổi của Module).
---- ----- ----- -----
Đây là bài cuối cùng ad chia sẻ về tín hiệu về Analog rồi, các bạn xem thêm các nội dung liên quan tại:
1/ Tại sao dải Analog 4-20mA được ưu tiên hơn 0-10V? >> https://www.facebook.com/hoplongtech/posts/4222166684472497
2/ Tại sao dùng tín hiệu 4-20mA mà không phải tín hiệu 0-20mA? >> https://www.facebook.com/hoplongtech/posts/4144020995620400
#hoplongtech #analog
Phần mềm GX Work 2
https://drive.google.com/u/0/uc?id=1k2gQW9NRzPuC_fxUn1qdyB2wxDdrFBdo&export=download
https://drive.google.com/file/d/1k2gQW9NRzPuC_fxUn1qdyB2wxDdrFBdo/view
| Phần mềm nâng cấp và thay thế cho phần mềm GX Developer, lập trình cho các dòng PLC FX, Q, L, A, S, CNC |
Công ty TNHH Tự Động Hóa Toàn Cầu xin gửi tới quý khách hàng và bạn đọc Phần mềm GX Work 2 Version 1.560J mới nhất Phần mềm có thể lập trình cho các dòng PLC Mitsubishi dòng FX0S, FX0, FX1, FX1S, FX1N, FX1NC, FX2N, FX2NC, FX3S, FX3G, FXGC, FX3U, FX3UC, dòng Q cpu (Q mode, A mode), L cpu, QS cpu, QnA cpu, A cpu, S cpu, CNC
GX Work 2 là phần mềm được Mitsubishi nâng cấp và thay thế cho GX Developer với giao diện trực quan đẹp hơn hơn, thao tác mượt mà và có hỗ trợ thêm các ngôn ngữ lập trình khác như là FBD (Function Block Diagram), SFC (Sequential Function Chart) - Phần mềm này khá nặng, nếu máy tính lập trình cấu hình thấp thì có thể sử dụng GX Developer - Nếu quý khách hàng lập trình cho FX5U thì cài thêm phần mềm GX Work 3
Tham khảo thêm: phần mềm GX Developer , phần mềm GX Work 3
PHẦN MỀM DOWNLOAD Chú ý: Dùng phần mềm giải nén Winrar phiên bản mới nhất V5.6 để tránh bị lỗi Phần mềm GX Work 2: Download
HƯỚNG DẪN CÀI ĐẶT PHẦN MỀM GX WORK 2
Để cài đặt phần mềm GX Work2, người dùng thực hiện theo trình tự sau: - Chạy file setup để cài đặt phần mềm.
- Ấn next. Nếu người dùng chưa cài phần mềm nào của Mitsubishi trước đó, phần mềm sẽ yêu cầu nhập key bản quyền, nhập dãy số 095-394462924 vào ô trống. Sau đó ấn Next để tiếp tục. - Nếu muốn cài đặt thêm GX Developers, tích vào ô Install GX Developers
- Ấn Next, chờ máy tính cài đặt phần mềm.
- Sau khi chạy cài đặt hoàn tất, khởi động lại máy tính để hoàn tất.
- Sau khi cài đặt xong, khởi động phần mềm GX Works 2 có biểu tượng như hình
-Phần mềm có giao diện như bên dưới
- Để tạo chương trình mới, vào Project-> chọn New project hoặc nhấn vào biểu tượng New trên thanh công cụ.
- Cửa sổ New project hiện lên:
Chọn OK để tạo một chương trình mới. - Một số công cụ, chức năng chính trong giao diện phần mềm:
|











.png)
Thứ Sáu, 21 tháng 5, 2021
PLC S7 200_Bài 9: Bộ định thời (Time)
9. Bộ định thời (Time)
9.1 Giới thiệu
Bộ định thời được sử dụng trong các yêu cầu điều khiển cần trì hoãn về thời gian. Đây là phần tử chức năng cơ bản của các bộ PLC và rất thường được sử dụng trong các chương trình điều khiển. Chẳng hạn như một băng tải khi có tín hiệu hoạt động sẽ chạy trong 10s rồi dừng lại, một van khí nén cần có điện trong 5s, nguyên liệu cần trộn trong thời gian 10 phút…Các PLC S7-200 có 256 Timer có địa chỉ từ T0 đến T255, chia làm 3 loại (xem thêm chương 4 Bộ điều khiển lập trình PLC S7-200) :
+ Timer đóng mạch chậm TON (On-delay Timer).
+ Timer đóng mạch chậm có nhớ TONR (Retentive On-delay Timer).
+ Timer ngắt mạch chậm TOF (Off-delay Timer).
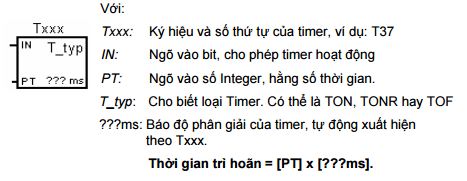
Khi sử dụng một timer chúng ta cần phải xác định các thông số sau:
- Loại timer (TON, TONR hay TOF)
- Độ phân giải của Timer. Có 3 độ phân giải là: 1ms, 10ms và 100ms
- Số của timer sẽ sử dụng, ví dụ T0, T37..cần tra bảng để biết loại timer sử dụng tương ứng với các số nào.
- Khai báo hằng số thời gian tương ứng với thời gian cần trì hoãn dựa vào độ phân giải của timer.
- Tín hiệu cho phép bắt đầu tính thời gian.
Ký hiệu chung của Timer S7-200 biểu diễn ở LAD như sau:
Ví dụ ta có
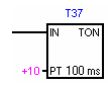 Đây là loại On-delay timer, có tên gọi là T37, có độ phân giải là 100ms. Thời gian trì hoãn là : 10 x 100ms = 1s.
Đây là loại On-delay timer, có tên gọi là T37, có độ phân giải là 100ms. Thời gian trì hoãn là : 10 x 100ms = 1s.
9.2 Timer đóng mạch chậm TON
Các Timer này được sử dụng khi có các yêu cầu trì hoãn một khoảng thời gian. Giá trị hiện hành của TON bị xóa khi ngõ vào IN ở logic “0”.
On-Delay Timer (TON) thực hiện đếm thời gian khi ngõ vào IN ở mức logic “1”. Khi giá trị hiện hành (Txxx) lớn hơn hoặc bằng thời gian đặt trước PT (preset time), thì Timer Bit ở logic “1”. Giá trị hiện hành của TON bị xóa khi ngõ vào IN ở logic “0”. Timer tiếp tục đếm dù đã đạt đến giá trị đặt PT, và dừng lại khi đếm đến giá trị max. 32767.
Để xóa timer, có thể sử dụng lệnh Reset (R). Lệnh Reset sẽ làm cho Timer Bit ở mức logic “0” và giá trị hiện hành của timer (Timer Current) =0.
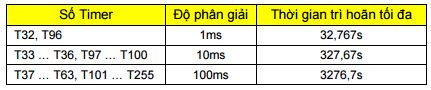
Có 192 timer TON/TOF trong S7-200 được phân chia theo độ phân giải như ở bảng sau:
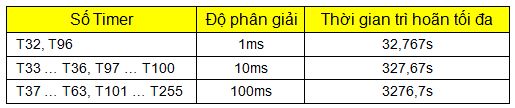
Chú ý: Vì TON và TOF sử dụng cùng số timer, nên không thể đặt cho cả hai có cùng số Timer. Ví dụ đã đặt TON là T37 thì không được đặt TOF là T37.
Ví dụ: Bật công tắc I0.0 (NO) thì sau 5s ngõ ra Q0.0 lên mức 1.
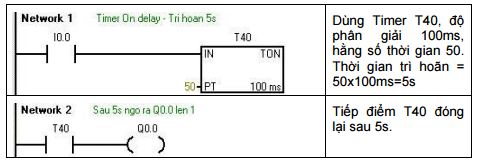
Giản đồ thời gian:
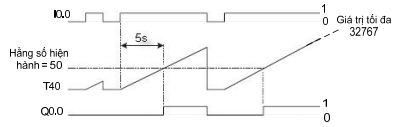
Qua giản đồ trên ta nhận thấy để timer TON trì hoãn được hết thời gian đặt trước (ví dụ 5s) thì trạng thái tín hiệu tại ngõ vào IN cần được duy trì ở mức 1 trong suốt khoảng thời gian này. Nếu sau 5s mà ngõ vào IN vẫn duy trì ở mức 1 thì giá trị hằng số thời gian trong timer sẽ tiếp tục tăng cho tới khi đạt giá trị tối đa là 32767.
Để lấy TON, ta nhấp chuột vào dấu (+) ở biểu tượng ![]() trong cây lệnh. Sau đó trỏ chuột vào
trong cây lệnh. Sau đó trỏ chuột vào ![]() giữ chuột trái, kéo và thả vào vị trí mong muốn. Nhập số Timer cho TON, điều kiện cho ngõ vào IN và giá trị ở PT theo mong muốn.
giữ chuột trái, kéo và thả vào vị trí mong muốn. Nhập số Timer cho TON, điều kiện cho ngõ vào IN và giá trị ở PT theo mong muốn.
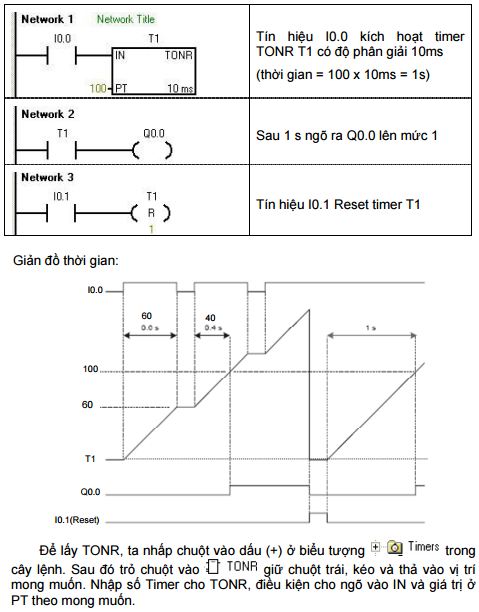
9.3 Timer đóng mạch chậm có nhớ TONR
Các Timer này được sử dụng khi cần tích lũy một số khoảng thời gian rời rạc. Giá trị hiện hành TONR chỉ có thể bị xóa bằng lệnh Reset (R).
Timer đóng mạch chậm có nhớ TONR (Retentive On-Delay Timer) thực hiện đếm thời gian khi ngõ vào IN ở mức logic “1”. Khi giá trị hiện hành (Txxx) lớn hơn hoặc bằng thời gian đặt trước PT (preset time), thì Timer Bit ở logic “1”. Giá trị hiện hành của TONR được giữ lại khi ngõ vào IN ở logic “0”. TONR được sử dụng để tích lũy thời gian cho nhiều chu kỳ ngõ vào IN ở mức “1”. Timer này vẫn tiếp tục đếm sau khi đã đạt đến giá trị đặt trước và dừng lại ở giá trị max. 32767.
Để xóa giá trị hiện hành của TONR và Timer Bit, ta sử dụng lệnh Reset (R).
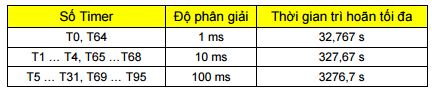
Có 64 timer TONR trong S7-200 được phân chia theo độ phân giải như ở bảng sau:
Ví dụ: Xét đoạn chương trình
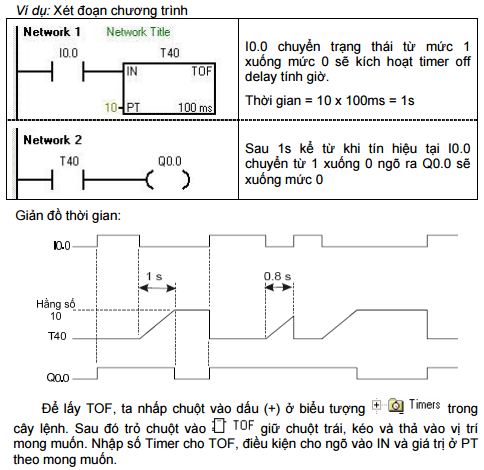
9.4 Timer mở mạch chậm TOF
Sử dụng timer này khi cần trì hoãn thêm một khoảng thời gian rồi mới tắt ngõ ra kể từ khi tín hiệu ngõ vào IN xuống “0”. Timer TOF chỉ thực hiện đếm thời gian khi IN chuyển từ “1” xuống “0”.
Khi ngõ vào IN của Off-Delay Timer (TOF) ở logic “1”, thì Timer Bit ngay lập tức được đặt lên mức logic “1” và giá trị hiện hành được xóa về 0. Khi ngõ
vào IN xuống “0”, thì timer đếm cho đến khi thời gian trôi qua đạt đến giá trị thời gian đặt trước. Khi đạt đến giá trị đặt trước, Timer Bit được đặt về “0” và giá trị hiện hành dừng đếm. Nếu ngõ vào IN ở “0” trong khoảng thời gian ngắn hơn giá trị đặt trước, thì Timer Bit giữ ở “1”.
Để xóa timer, có thể sử dụng lệnh Reset (R). Lệnh Reset sẽ làm cho Timer Bit ở mức logic “0” và giá trị hiện hành của timer (Timer Current) =0.
Có 192 timer TON/TOF trong S7-200 được phân chia theo độ phân giải như ở bảng sau:
Chú ý: Vì TON và TOF sử dụng cùng số timer, nên không thể đặt cho cả hai có cùng số Timer. Ví dụ đã đặt TON là T37 thì không được đặt TOF là T37.
Ví dụ: Xét đoạn chương trình
9.5 Ứng dụng Timer
9.5.1 Tạo xung có tần số theo mong muốn
Viết chương trình tạo xung theo mong muốn để sử dụng vào các mục đích khác nhau theo giản đồ xung sau:
9.5.2 Tạo Timer xung và timer xung có nhớ
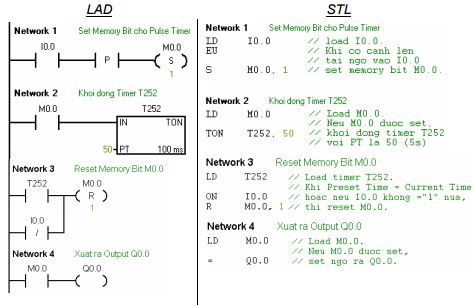
9.5.2.1 Timer xung (Pulse timer)
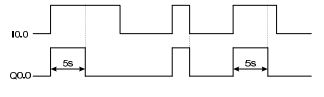
![]() Timer xung sẽ cho ngõ ra là một xung khi tín hiệu vào ở mức logic “1” có thời gian lớn hơn hay bằng thời gian đặt ở timer xung. Để dễ hình dung xem giản đồ thời gian của chương trình tạo timer xung với ngõ ra timer là Q0.0, ngõ vào tín hiệu là I0.0, thời gian xung là 5s như sau:
Timer xung sẽ cho ngõ ra là một xung khi tín hiệu vào ở mức logic “1” có thời gian lớn hơn hay bằng thời gian đặt ở timer xung. Để dễ hình dung xem giản đồ thời gian của chương trình tạo timer xung với ngõ ra timer là Q0.0, ngõ vào tín hiệu là I0.0, thời gian xung là 5s như sau:
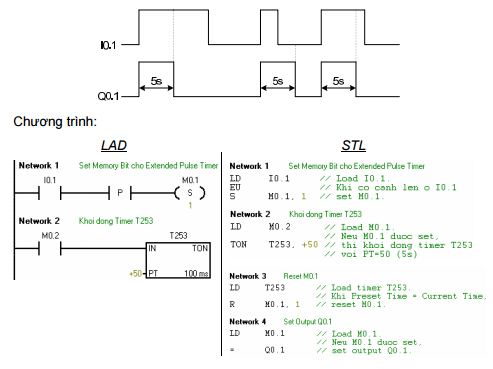
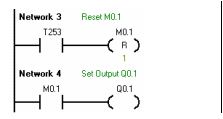
9.5.2.2 Timer xung có nhớ (Extended Pulse timer)
![]() Timer xung sẽ cho ngõ ra là một xung khi có một xung tín hiệu vào. Để dễ hình dung xem giản đồ thời gian của chương trình tạo timer xung với ngõ ra timer là Q0.1, ngõ vào tín hiệu là I0.1, thời gian xung là 5s như sau:
Timer xung sẽ cho ngõ ra là một xung khi có một xung tín hiệu vào. Để dễ hình dung xem giản đồ thời gian của chương trình tạo timer xung với ngõ ra timer là Q0.1, ngõ vào tín hiệu là I0.1, thời gian xung là 5s như sau:
9.5.3 Đảo chiều quay động cơ có khống chế thời gian
Mô tả hoạt động
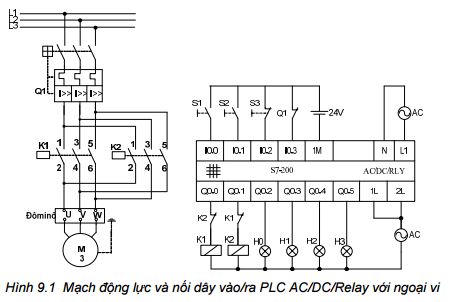
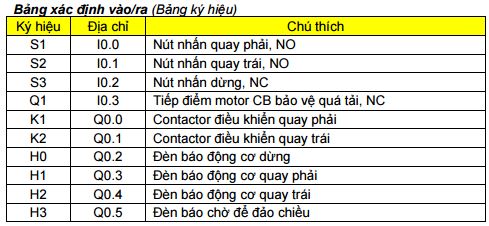
Một động cơ điện 3 pha có thể đảo chiều quay. Khi ấn nút nhấn quay phải “S1” (NO) thì động cơ quay phải, đèn “H1” sáng báo động cơ quay phải. Khi ấn nút nhấn quay trái “S2” (NO) thì động cơ quay trái, đèn “H2” sáng báo động cơ quay trái. Động cơ có thể dừng bất cứ lúc nào nếu ấn nút nhấn dừng “S3” (NC) hoặc xảy ra sự cố quá dòng làm cho tiếp điểm (NC) của thiết bị bảo vệ “Q1” (motor CB) tác động. Khi dừng thì đèn báo “H0” sáng.
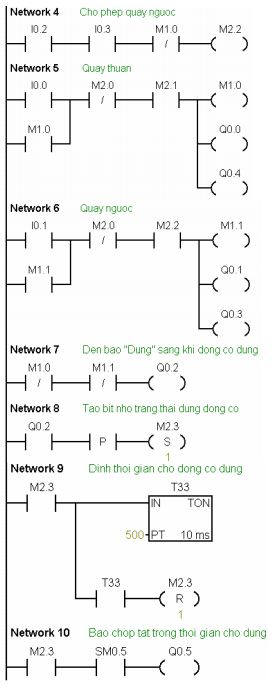
Việc đảo chiều quay không thể thực hiện được sau khi nút dừng “S3” được ấn và chưa hết 5s chờ cho động cơ dừng hẳn. Đèn báo chờ đợi “H3” sẽ chớp tắt với tần số 1Hz trong thời gian chờ động cơ dừng hẳn.
Sơ đồ mạch động lực và nối dây với PLC:
Ở chương 7, ta đã sử dụng PLC S7-200 loại DC/DC/DC. Ở chương này để giúp bạn đọc làm quen với nhiều loại ngõ ra, S7-200 được sử dụng là loại AC/DC/RLY (Xem thêm chương 5).
Do ngõ ra của PLC là loại relay nên ta có thể nối trực tiếp ngõ ra với cuộn dây của contactor điều khiển động cơ, tuy nhiên cần chú ý đến mạch an toàn cho các ngõ ra.
Phân tích:
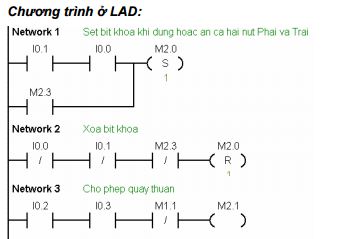
- Trong các bài toán điều khiển động cơ, ta cần phải chú ý xem, nếu có sự cố xảy ra với các nút nhấn có làm cho động cơ hoạt động không theo mong muốn hay không. Để đề phòng trường hợp này xảy ra, người lập trình phải tạo ra một khóa.
Đối với mạch đảo chiều quay, có khống chế thời gian dừng (ở đây là 5s) thì khóa sẽ khống chế không cho động cơ khởi động không theo mong muốn cũng như sai chiều quay. Nếu khóa chưa được xóa về 0, thì không thể khởi động hay đảo chiều động cơ được. Trong bài toán này, khóa xóa về 0 khi cả 2 nút nhấn “S1” và “S2” không được tác động (ở trạng thái bình thường), hoặc thời gian chờ dừng đã hết. Khóa được chọn là M2.0
- Khi nút nhấn dừng “S3” được ấn, động cơ dừng và phải đợi trong thời gian 5s mới dừng hẳn, nên ta cần nhớ lại trạng thái này trong thời gian 5s để làm điều kiện SET cho khóa M2.0. Chọn memory bit M2.3.
- Để định thời 5s, sử dụng Timer TON. Chọn timer T33
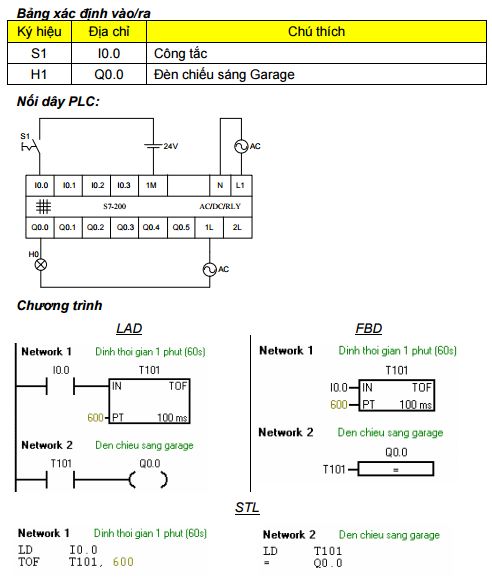
9.5.4 Chiếu sáng Garage
Mô tả hoạt động
Đèn trước cửa Garage không được tắt ngay lập tức khi ấn công tắc, mà nó vẫn còn sáng thêm một khoảng thời gian nữa (khoảng 1 phút) để cho người đi.
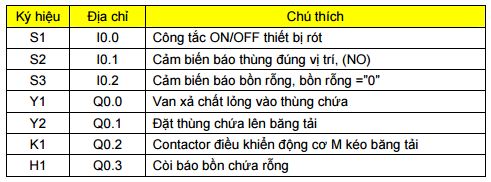
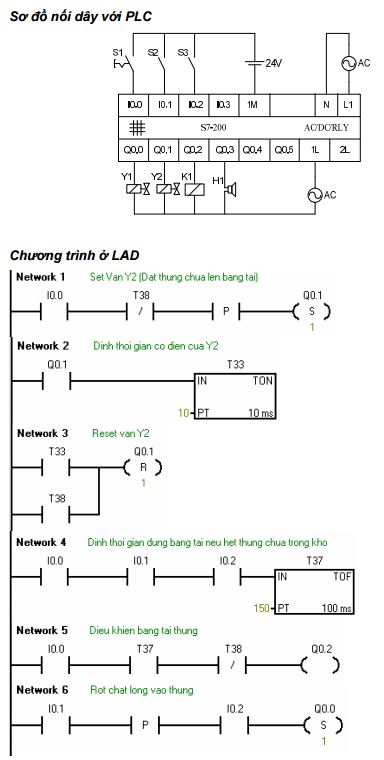
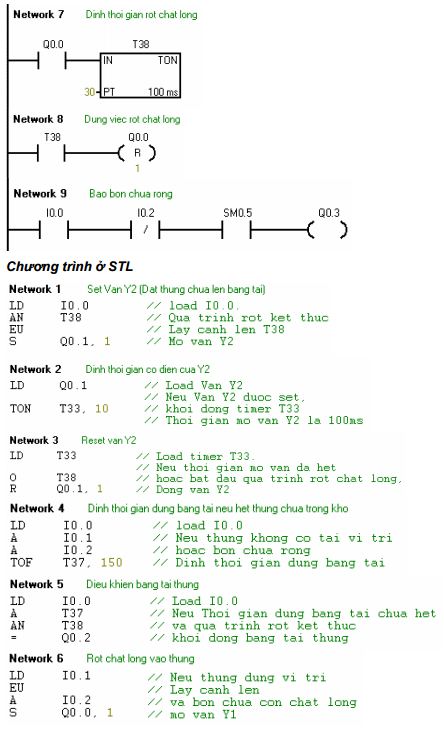
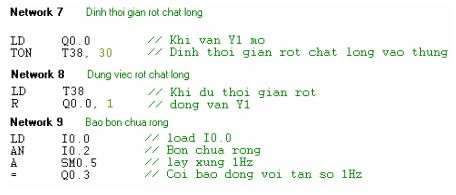
9.5.5 Thiết bị rót chất lỏng vào thùng chứa
Sơ đồ công nghệ
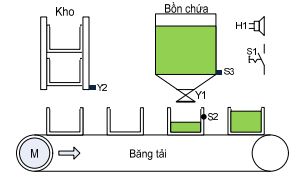
Hình 9.2: Sơ đồ công nghệ thiết bị rót.
Mô tả hoạt động
Khi bật công tắc “S1” thì thùng từ kho chứa thùng rỗng sẽ được đưa vào băng tải, và băng tải vận chuyển thùng hoạt động. Khi một thùng rỗng đến dưới bồn chứa (được nhận biết bởi cảm biến “S2”) thì băng tải dừng. Van “Y1” mở rót chất lỏng trong bồn vào thùng. Sau thời gian 5s thì thùng chứa đầy. Van “Y1” đóng lại, một thùng rỗng sẽ được đưa vào băng tải và băng tải tiếp tục di chuyển cho đến khi nào thùng đến dưới bồn chứa thì dừng lại. Quá trình cứ lặp lại. Nếu chất lỏng trong bồn chứa hết thì còi “H1” sẽ báo với tần số 1Hz. Nếu thùng chứa trong kho hết thì băng tải cũng tự động dừng sau thời gian 15s kể từ thùng cuối cùng được rót đầy.
Chú ý: “Y2” là một solenoid được sử dụng để chặn thùng trong kho. Để thùng rớt vào băng tải chỉ cần solenoid có điện trong thời gian 100ms.
9.6 Câu hỏi và bài tập
BT9.1 Đèn hành lang hoặc đèn cầu thang có định thời.
Trên tường của các hành lang chung cư, trước mỗi cửa căn hộ có gắn một nút nhấn (giả sử hành lang có 6 căn hộ tương ứng 6 nút ấn từ S1 đến S6) . Khi tác động nút nhấn thì đèn chiếu sáng hành lang (gồm có 6 đèn H1 đến H6) sẽ sáng trong thời gian 1 phút rồi sau đó tự động tắt. Nếu trong thời gian 1 phút mà có một nút nhấn nào đó được ấn tiếp tục thì đèn sẽ sáng thêm 1 phút nữa kể từ lúc ấn sau cùng. Yêu cầu:
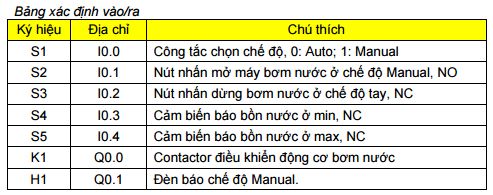
- Lập bảng xác định vào/ra
- Vẽ sơ đồ nối dây vào/ra và nguồn cấp cho PLC S7-200 AC/DC/RLY.
- Viết chương trình và sau đó nạp vào PLC để kiểm tra.
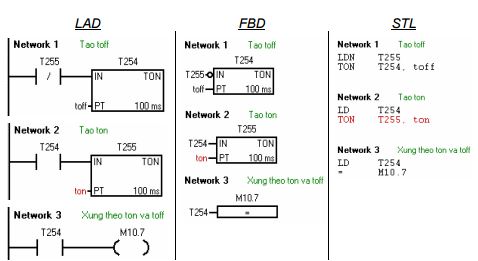
BT9.2 Tạo OFF-delay Timer
Từ một ON-delay timer, hãy viết chương trình tạo OFF-delay timer theo sơ đồ ở mục 9.4.
BT9.3 Điều khiển Đèn và Quạt hút
Trong một phòng vệ sinh có trang bị một đèn chiếu sáng và một quạt hút khí. Khi vào phòng, bật công tắc lên vị trí “ON” thì đèn sáng. Nếu ở trong phòng lâu hơn thời gian 3 phút thì quạt hút tự động hoạt động. Khi ra khỏi phòng bật công tắc về vị trí “OFF” thì đèn tắt. Nếu quạt hút đã hoạt động thì sau khi đèn tắt khoảng 5 phút nó mới tự động dừng. Yêu cầu:
- Lập bảng xác định vào/ra
- Vẽ sơ đồ nối dây PLC với ngoại vi
- Viết chương trình điều khiển và nạp vào PLC để kiểm tra
BT9.4 Điều khiển bơm nước
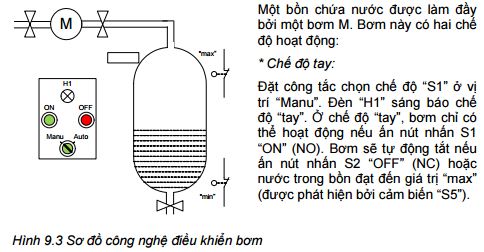
* Chế độ tự động:
Khi đặt công tắc “S1” về vị trí “Auto”, thì bơm nước hoạt động tự động. Nếu nước xuống dưới mức “min” (phát hiện bởi cảm biến “S4”) thì bơm sẽ được đóng điện bởi contactor K1. Khi nước trong bồn lên đến vị trí “max” thì contactor mất điện và động cơ bơm nước dừng. Ở chế độ tự động thì đèn H1 tắt.
Nhằm loại trừ sự sóng sánh của mặt nước khi bơm làm cho cảm biến báo mực nước ở vị trí “max” không chính xác, thì động cơ bơm nước cần phải kéo dài thời gian hoạt động thêm 1s nữa rồi mới dừng hẳn cho cả hai trường hợp “Manual” và “Auto”.
Yêu cầu:
- Vẽ sơ đồ mạch động lực nối contactor với động cơ bơm nước 3pha
- Lập bảng xác định vào/ra
- Vẽ sơ đồ nối dây PLC
- Viết chương trình điều khiển và nạp vào PLC để kiểm tra.
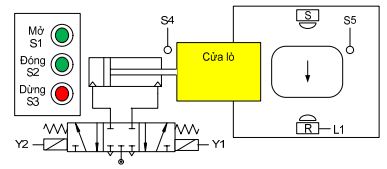
BT9.5 Điều khiển cửa lò
Một cửa lò có chức năng “mở, đóng và ở vị trí bất kỳ” được điều khiển bởi một cylinder. Ở vị trí bình thường thì cửa lò được đóng.
- Khi tác động nút nhấn “S1” (NO) thì cửa lò mở ra và khi đến công tắc hành trình giới hạn mở cửa “S4” (NC) thì dừng lại.
- Nếu cửa đã mở ra ở vị trí giới hạn mở cửa “S4” thì sẽ tự động đóng lại sau thời gian 6s hoặc nút nhấn đóng cửa “S2” (NO) được ấn.
- Khi đến giới hạn cửa đóng “S5” (NC) thì việc đóng cửa kết thúc.
- Quá trình đóng cửa dừng ngay lập tức nếu cảm biến L1 (NO) bị tác động. Nhưng nếu cảm biến quang không bị tác động thì quá trình đóng cửa vẫn tiếp tục.
- Khi cửa lò đang dịch chuyển có thể dừng bằng cách ấn nút dừng “S3” (NC).
Sơ đồ công nghệ
Yêu cầu:
- Vẽ sơ đồ nối dây với PLC
- Viết chương trình và nạp vào PLC để kiểm tra.
BT9.6 Điều khiển quá trình khởi động động cơ rotor dây quấn
Nhằm tránh dòng điện khởi động cao trong các động cơ rotor dây quấn có gắn thêm các điện trở phụ.
Khi tác động nút nhấn mở máy “S1” (NO), thì contactor K1 có điện. Các contactor K2, K3 và K4 bắt đầu đóng lần lượt cách nhau một khoảng thời gian là 5s. Khi contactor cuối cùng là K4 được đóng thì rotor được ngắn mạch và động cơ hoạt động ở chế độ định mức.
Khi tác động nút nhấn “S0” (NC) thì động cơ dừng.
Sơ đồ công nghệ
Yêu cầu:
- Lập bảng xác định vào/ra
- Vẽ sơ đồ nối dây với PLC loại DC/DC/DC
- Viết chương trình và nạp vào PLC để kiểm tra.
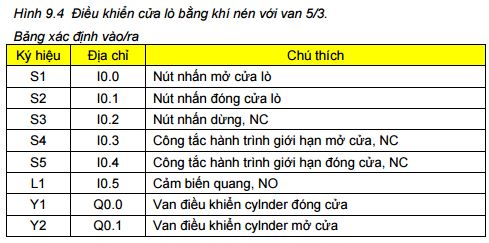
BT9.7 Giám sát hoạt động băng tải bằng cảm biến phát xung
Một băng tải được truyền động thông qua một động cơ. Khi băng tải hoạt động thì cảm biến giám sát băng tải “S2” phát xung có điện áp 24V với tần số 10Hz. Khi băng tải đứng yên thì “S2” phát ra tín hiệu “0”.
Khi có lỗi xảy ra, ví dụ băng tải bị kẹt, tín hiệu giám sát không phát ra, ta cũng không biết là động cơ có tắt hay không. Trong trường hợp này, động cơ kéo băng tải phải dừng ngay lập tức và chuông báo băng tải bị lỗi “H1” vang với tần số 2Hz.
- Băng tải khởi động bằng nút nhấn “S1” (NO).
- Băng tải dừng bằng nút nhấn “S0” (NC).
Yêu cầu:
- Vẽ sơ đồ nối dây với PLC loại DC/DC/DC
- Viết chương trình và nạp vào PLC để kiểm tra.
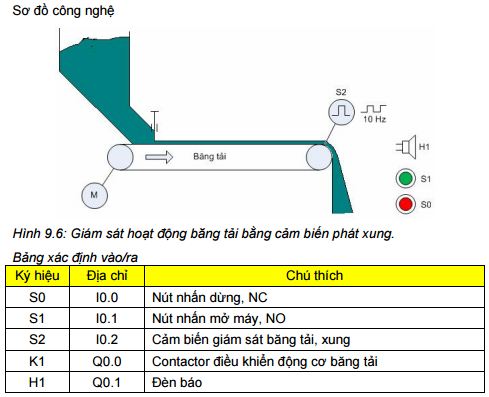
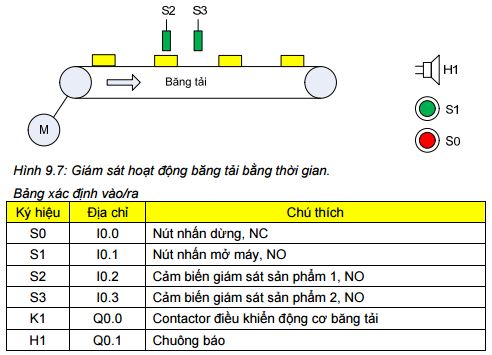
BT9.8 Giám sát hoạt động băng tải bằng thời gian
Một băng tải vận chuyển sản phẩm được truyền động thông qua một động cơ. Sản phẩm trên băng tải được nhận biết bởi hai cảm biến “S2” và “S3”.
Thời gian tối đa để sản phẩm di chuyển từ “S2” đến “S3” là 3s. Nếu vượt quá thời gian này thì băng tải xem như bị lỗi. Khi bị lỗi thì động cơ kéo băng tải dừng ngay lập tức và một chuông báo phát ra với tần số 3Hz.
- Băng tải khởi động bằng nút nhấn “S1” (NO).
- Băng tải dừng bằng nút nhấn “S0” (NC).
Sơ đồ công nghệ
Yêu cầu:
- Vẽ sơ đồ nối dây với PLC loại DC/DC/DC
- Viết chương trình và nạp vào PLC để kiểm tra.
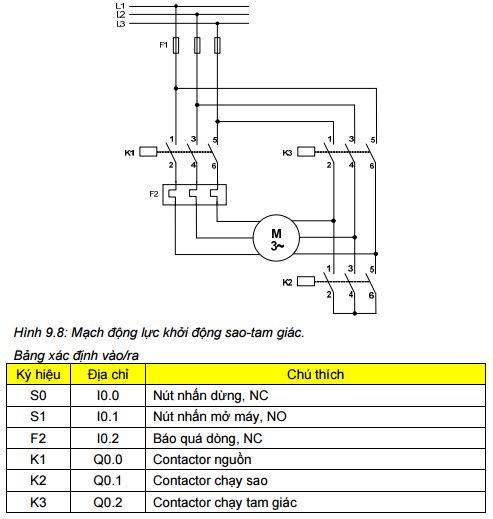
BT9.9 Khởi động Sao-tam giác
Thực hiện trình tự khởi động tự động sao-tam giác của một động cơ điện không đồng bộ 3 pha rotor lồng sóc với PLC theo sơ đồ hình 9.8.
Khi ấn nút nhấn “S1” (NO), thì động cơ hoạt động ở chế độ sao (K1 và K2 đóng). Và sau một thời gian đặt trước (giả sử 10s), thì tự động chuyển sang chế độ tam giác (K2 mất điện, K3 có điện).
Khi ấn nút “S0” (NC) thì động cơ dừng ngay lập tức. Trong trường hợp quá tải (được báo bởi tiếp điểm nhiệt F2) thì động cơ cũng dừng.
Sơ đồ mạch động lực
Yêu cầu:
- Vẽ sơ đồ nối dây với PLC loại AC/DC/RLY
- Viết chương trình và nạp vào PLC để kiểm tra.
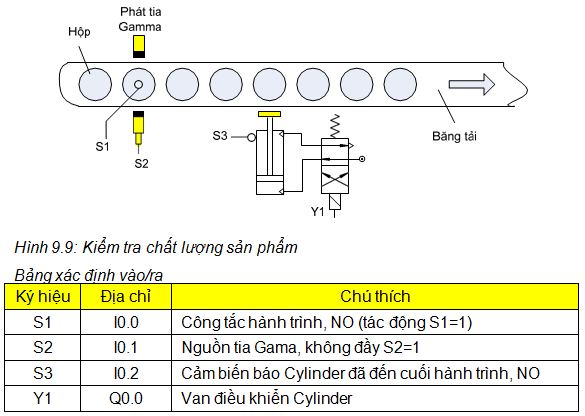
BT9.10 Kiểm tra chất lượng sản phẩm
Đồ hộp được vận chuyển trên một băng tải. Các hộp cách nhau một khoảng nhỏ. Các hộp đã được đóng nắp cần được kiểm tra tình trạng đổ đầy.
Việc kiểm tra chất lượng được thực hiện với một nguồn phát tia Gamma, đầu thu sẽ phát tín hiệu “1” nếu hộp không được đổ đầy. Việc đo được thực hiện xong nếu công tắc hành trình S1 bị tác động (phát ra tín hiệu “1”). Trường hợp hộp không được đổ đầy thì sau thời gian đo 2s, van Y1 điều khiển Cylinder đẩy hộp kém chất lượng ra ngoài.
Sơ đồ công nghệ
Yêu cầu:
- Vẽ sơ đồ nối dây với PLC loại AC/DC/RLY.
- Viết chương trình và nạp vào PLC để kiểm tra.
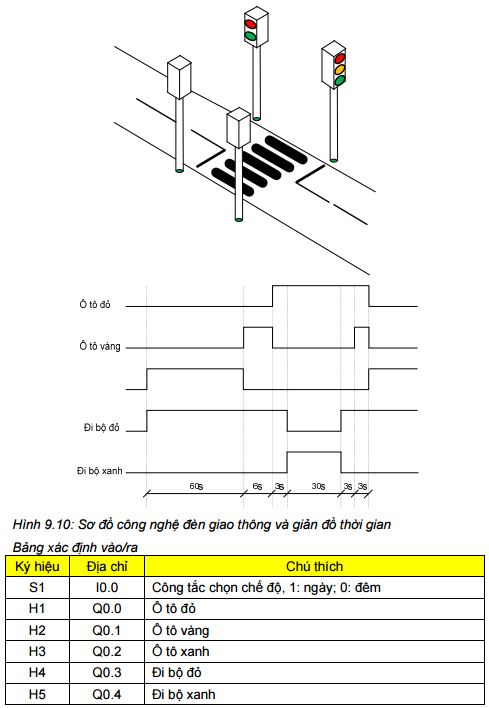
BT9.11 Điều khiển đèn giao thông
Một giao lộ có lối đi dành cho người đi bộ và ô tô hoạt động ở hai chế độ ngày và đêm.
* Chế độ ngày
Đèn hoạt động hoàn toàn tự động theo giản đồ thời gian hình 9.10. Chế độ ngày được chọn khi công tắc S1 ở logic “1”.
* Chế độ đêm
Khi đặt công tắc S1 ở logic “0” thì bộ điều khiển chuyển sang hoạt động ở chế độ đêm. Khi chuyển sang chế độ đêm thì chế độ ngày bị cắt ngay lập tức. Tất cả các đèn đều tắt, chỉ có đèn vàng ở đường dành cho ô tô chớp tắt với tần số 1Hz.
Sơ đồ công nghệ và giản đồ thời gian