Bản vẽ kết nối của bộ điều khiển AD75P với servo MR-J2S-A
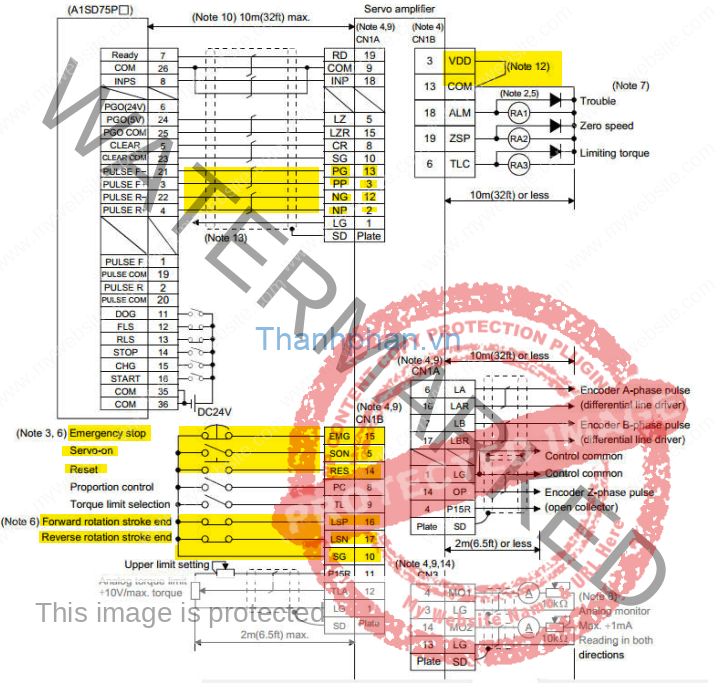
Các chân thường dùng:
CN1B:
- SON (5): servo On
- EMG (15): dừng khẩn cấp. Khi chân này hở mạch báo lỗi A.E6 ( Servo emergency stop )
- RES (14): xóa lỗi ( tùy chọn )
- LSP (16): giới hạn quay chiều thuận khi điều khiển vị trí
- LSN (17): giới hạn quay chiều nghịch khi điều khiển vị trí
- SG (10) : chân chung
- VDD (3)
- COM (13)
- ZSP (19) : zero speed (ZSP) / Electromagnetic brake interlock (MBR)
- ALM (18): báo lỗi
CN1A: Chân điều khiển xung và hướng
- OPC (11)
- PP (3)
- NP (2)
- PG 9 (13)
- NG (12)
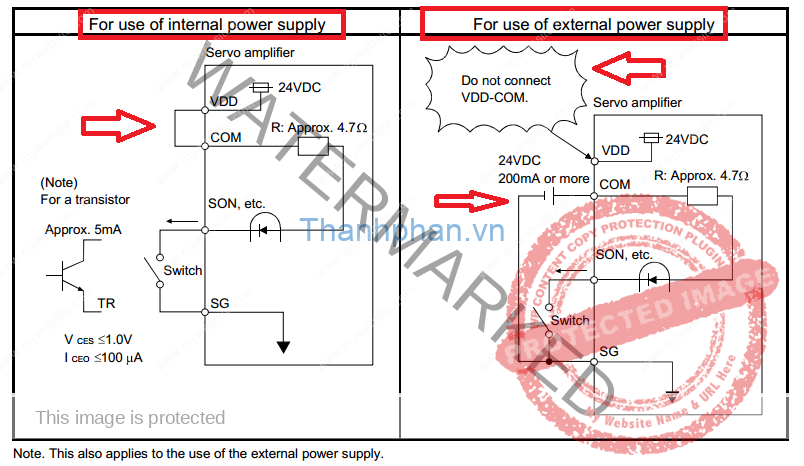
Chú ý: Note 12
Khi sử dụng nguồn nội thì VDD — Com
Nếu sử dụng nguồn ngoài thì không cần
Kết nối dùng nguồn nội và nguồn ngoài
Sơ đồ kết nối bộ servo MR-J2S-A


Lưu đồ cài đặt servo

bài viết liên quan:
1. Xác định số chân jack kết nối servo mitsubishi MR-J2S-A
2. Dùng phần mềm cấu hình servo MR-J2S.
3. PLC điều khiển Servo MR-J2S-A.










0 nhận xét:
Đăng nhận xét